Магнитное поле статора асинхронного двигателя. Что такое статор и ротор и чем они отличаются
Обмотка электротехнического изделия (устройства) - совокупность определенным образом расположенных и соединенных витков или катушек, предназначенная для создания или использования магнитного поля, или для получения заданного значения сопротивления электротехнического изделия (устройства). Катушка обмотки электротехнического изделия (устройства) - обмотка электротехнического изделия (устройства) или ее часть, выполненные в виде отдельной конструктивной единицы (ГОСТ 18311-80).
Токи протекают в стержнях ротора, в то время как статор содержит вращающееся магнитное поле. Когда эти два элемента взаимодействуют, это создает крутящий момент. Из-за скорости вращения ротора наблюдается отставание в скорости магнитного поля. Это приводит к тому, что роторные стержни генерируют мощный крутящий момент, так как роторные стержни обрезают магнитные силовые линии.
Разрушение асинхронного двигателя
Процент скольжения - это метод, который помогает рассчитать скорость работы электродвигателя. Более высокая нагрузка также увеличивает проскальзывание и количество создаваемого крутящего момента. Сдвиг двигателя зависит от параметров, связанных с характеристиками двигателя. Кроме того, несколько факторов влияют на сопротивление ротора, частоту напряжения статора и крутящий момент нагрузки. По мере увеличения проскальзывания это также влияет на скорость индукции раненого двигателя. Для увеличения проскальзывания цепи ротора необходимо получить максимальное сопротивление.
В статье рассказано про устройство обмоток статора и ротора электрических машин переменного тока.
Статор с двенадцатью пазами, в каждый из которых уложено по одному проводнику, схематично показан на рис. 1, а. Соединения между проводниками, уложенными в пазах, указаны только для одной из трех фаз; начала фаз А, В, С обмотки обозначены С1, С2, С3; концы - С4, С5, С6. Части обмотки, уложенные в пазах (активная часть обмотки), условно показаны в виде стержней, а соединения между проводниками, находящимися в пазах (лобовые соединения),- сплошной линией.
Связь между скольжением и частотой
Двигатели с более низкой мощностью также имеют гораздо более высокую проскальзывание, чем у тех, у кого высокая мощность, из-за способности первого производить значительное сопротивление в обмотке ротора. Когда происходит проскальзывание асинхронного двигателя, напряжение остается на своем максимальном уровне. Однако поворот ротора приводит к уменьшению напряжения и скольжения. Стоит также отметить, что существует прямая пропорция со скольжением и частотой. Это означает, что при уменьшении скольжения частота также уменьшается.
Сердечник статора имеет вид полого цилиндра, представляющего собой пакет или ряд пакетов (разделенных вентиляционными каналами) из листов электротехнической стали. Для машин малой и средней мощности каждый лист штампуется в виде кольца с пазами вдоль внутренней окружности. На рис. 1,б дан лист статора с пазами одной из применяемых форм.
Как частота, так и скольжение также влияют на индуктивное сопротивление асинхронного двигателя. Когда ротор находится в своем стационарном состоянии, это сохраняет индуктивное сопротивление, скольжение и частоту на самом высоком уровне. Вращательное движение ротора приводит к уменьшению индуктивного сопротивления. Таким образом, коэффициент мощности становится таким низким, поскольку ротор относится к суммированию изменчивого индуктивного сопротивления и постоянному сопротивлению, что приводит к изменениям индуктивного реактивного сопротивления с проскальзыванием.
Рис. 1. Расположение обмотки в пазах статора и распределение токов в проводниках
Пусть мгновенное значение тока iA первой фазы в некоторый момент времени максимально и ток направлен от начала С1 фазы к ее концу С4. Будем считать такой ток положительным.
Определяя мгновенные токи в фазах как проекции вращающихся векторов на неподвижную ось ON (рис. 1, в), получим, что токи фаз В и С в данный момент времени отрицательны, т. е. направлены от концов фаз к началам.
Вращение двигателя помещает индуктивное сопротивление в его высокие точки. Однако дальнейшее увеличение скорости двигателя имеет другой эффект. Например, это приводит к уменьшению индуктивного реактивного сопротивления до тех пор, пока оно не станет эквивалентным сопротивлению.
Возвращаясь к предыдущему заявлению о том, как скольжение создает крутящий момент, стоит упомянуть его эффект для асинхронных двигателей. Проскальзывание не достигает нуля и продолжает вращать ротор в электрических асинхронных двигателях. Если скольжение падает до нуля, поле ротора начинает захватывать поле статора. Затем сила между статором и ротором достигает нуля, пока это не достигнет точки, что ротор больше не может вращаться. Это также приводит к притяжению между статором и ротором, позволяя при этом скольжению стать более эффективным.
Проследим по рис. 1, г образование вращающегося магнитного поля. В рассматриваемый момент времени ток фазы А направлен от ее начала к концу, т. е. если в проводниках 1 и 7 он идет от нас за плоскость чертежа, то в проводниках 4 и 10 он идет из-за плоскости чертежа к нам (см. рис. 1, а и г).
В фазе В ток в этот момент времени идет от конца фазы к ее началу. Соединив проводники второй фазы по образцу первой, можно получить, что ток фазы В проходит по проводникам 12, 9, 6, 3; при этом по проводникам 12 и 6 ток идет от нас за плоскость чертежа, а по проводникам 9 и 3 - к нам. Картину распределения токов в фазе С получим по образцу фазы В.
Существуют способы минимизации скольжения в асинхронных двигателях. Можно устранить проблему при проскальзывании через резистор, постоянный магнит и синхронные двигатели, поскольку эти двигатели не требуют измеримого скольжения. Синхронный двигатель отлично подходит как для низкомощных, так и для очень мощных применений. Не рекомендуется использовать в диапазоне средней мощности, что характерно для нескольких промышленных применений. Мотор с сопротивлением известен для менее идеального выходного и весового коэффициента.
Это делает их менее конкурентоспособными и надежными, чем асинхронный двигатель с короткозамкнутым ротором. Наконец, двигатели с постоянными магнитами являются общими с приводами с регулируемой скоростью. Известно, что они обеспечивают точное управление скоростью без использования редукторов, позволяя вам выбирать очень низкую базовую скорость. Точное управление скоростью также возможно без скольжения. Единственным ограничением этого типа двигателя является отсутствие стандартизации и крутой ценовой точки.
Направления токов даны на рис. 1,г; штриховыми линиями показаны магнитные линии поля, создаваемого токами статора; направления линий определены по правилу правого винта. Из рисунка видно, что проводники образуют четыре группы с одинаковыми направлениями тока и число полюсов 2р магнитной системы получается равным четырем. Участки статора, где магнитные линии выходят из него, представляют собой северные полюсы, а участки, где магнитные линии входят в статор, - южные полюсы. Дуга окружности статора, занятая одним полюсом, называется полюсным делением.
Поскольку есть более низкая величина скольжения с большими двигателями, вероятно, можно считать это жизнеспособным решением со скольжением. Единственным недостатком, который может возникнуть в этом решении, является тот факт, что ваши эксплуатационные расходы и первоначальные инвестиции будут увеличиваться из-за увеличения потребления энергии с помощью более крупного двигателя.
Следовательно, лучше всего взвесить ваши варианты при попытке уменьшить проскальзывание. Эти шаги помогут вам принять более обоснованное решение. Конструкция статора трехфазной индукционной машины похожа на конструкцию трехфазной синхронной машины. Как и в случае других машин переменного тока, скорость вращения магнитного поля статора описывается как синхронная скорость и определяется. Ротор индукционной машины отличается от других типов машин, которые мы рассмотрели до сих пор: нет требования к источнику питания на роторе.
Магнитное поле в различных точках окружности статора различно. Картина распределения магнитного поля вдоль окружности статора повторяется периодически через каждое двойное полюсное деление 2τ ; угол дуги 2τ принимается за 360 электрических градусов. Так как вдоль окружности статора размещается р двойных полюсных делений, то 360 геометрических градусов равны 360р электрическим градусам, а один геометрический градус равен р электрическим градусам.
Ротор индукционной машины может быть одним из двух типов. Индукционные машины с роторным ротором имеют трехфазную обмотку, похожую на обмотку статора, на ротор. Ротор обычно соединен с гнездом трех фаз ротора, соединенных со скользящими кольцами. При нормальной работе обмотки на скользящих кольцах замыкаются, чтобы ток текла. Преимуществом раневых роторных машин является то, что внешние цепи могут быть подключены к ротору, что позволяет осуществлять внешнее управление машиной. В то время как все индукционные машины могут управляться для работы с различными моментами и скоростями, управление раневым ротором особенно привлекательно в некоторых случаях.
На рис. 1, г показаны магнитные линии для некоторого фиксированного момента времени. Если же рассмотреть картину магнитного поля для ряда последовательных моментов времени, можно убедиться в том, что поле вращается с постоянной скоростью.
Найдем скорость вращения поля. По истечении времени, равного половине периода переменного тока, направления всех токов изменяются на обратные, поэтому магнитные полюсы меняются местами, т. е. за половину периода магнитное поле поворачивается на часть оборота, равную 1/2ρ . За один период переменного тока поле поворачивается на 1/ρ оборота. Тогда за одну секунду поле совершает 1/ρ оборотов, где f - частота переменного тока. Следовательно, скорость вращения магнитного поля статора, т. е. синхронная скорость, равна (в оборотах в минуту)
Индукционные машины с раневым ротором обычно значительно дороже, чем машины с роторными сепараторами. Возможные применения для машин с раневым ротором включают. Скорость управления очень большими машинами снижает затраты на управление большими машинами. Кровообразующие машины являются наиболее распространенным типом асинхронного двигателя. В конструкции ротора сепаратора в прорези на роторе имеются сплошные проводники. Концы проводников коротко замыкаются на каждом конце ротора с помощью «концевого кольца».
Для малогабаритных машин роторные проводники отливаются из алюминия. Эта конструкция делает ротор относительно дешевым для производства. В более крупных машинах роторы обычно изготавливаются вручную, забивая твердые медные стержни в гнезда ротора, а затем вручную пайки концевого кольца на месте. Изготовленные клетки ротора значительно дороже, чем литые роторные клетки.
Число р пар полюсов может быть только целым, поэтому при частоте, например, 50 Гц синхронная скорость может равняться 3000; 1500; 1000 об/мин и т. д.
Рис. 2. Развернутая схема трехфазной однослойной обмотки
Характерной величиной, определяющей выполнение обмотки, является число пазов на полюс и фазу, т. е. число пазов, занимаемых обмоткой каждой фазы в пределах одного полюсного деления:
На приведенных ниже фотографиях показаны различные аспекты конструкции индукционной машины. На приведенных выше фотографиях показано: старая индукционная машина 15 л.с. с открытым корпусом статора; индукционная машина мощностью 5 кВт, используемая в лабораторных скамьях; современная высокопроизводительная индукционная машина мощностью 2 л.с. В корпусе статора нет отверстий, и нет возможности, чтобы материал окружающей среды попал в двигатель. Вентилятор находится вне корпуса и продувает воздух над ребрами корпуса корпуса статора.
Статор двигателя состоит из множества тонких стальных листов, уложенных вместе и удерживаемых в корпусе ротора. Проводники, образующие катушки в обмотках статора, проходят через щели в ламинации статора. Катушки в этой машине изолированы от ламинатов с использованием пластиковых листов и удерживаются вместе со струной и бумагой для разделения групп катушек. Затем обмотки статора и слоистые слои затем погружают в лак и выпекают для обеспечения механической целостности.
где z- число пазов статора.
Обмотка, приведенная на рис. 1, а, имеет следующие данные:
Даже для этой простейшей обмотки пространственный чертеж проводников и их соединений получается сложным, поэтому он обычно заменяется развернутой схемой, где проводники обмотки изображаются расположенными не на цилиндрической поверхности, а на плоскости (цилиндрическая поверхность с пазами и обмоткой «развертывается» в плоскость). На рис. 2, а дана развернутая схема рассмотренной обмотки статора.
Ротор двигателя мощностью 2 л.с. построен с использованием стального ламинирования и литого алюминия. Если вы внимательно посмотрите на фотографии ротора, можно увидеть, где расплавленный алюминий выщелачивается между стальными пластинами. Кроме того, проводники в роторе были сконструированы с «перекосом» одного шага проводника. Проводники не расположены параллельно оси ротора, но под углом это делается для уменьшения вибраций крутящего момента и шума.
На последних двух фотографиях ниже показаны различные конструкции ротора. Слева находятся два ротора в лаборатории, ротор с литой клеткой и раневой ротор, в комплекте с кольцами скольжения. Справа - вырезанный мотор из лаборатории с изготовленной клеткой медных прутков, также со значительным перекосом.
На предыдущем рисунке было для простоты показано, что часть фазы А обмотки, уложенная в пазах 1 и 4, состоит всего из двух проводников, т. е. из одного витка. В действительности же каждая такая часть обмотки, приходящаяся на один полюс, состоит из w витков, т. е. в каждой паре пазов помещается по w проводников, объединенных в одну катушку. Поэтому при обходе по развернутой схеме, например, фазы А от паза 1 нужно w раз обойти пазы 1 и 4, прежде чем перейти к пазу 7. Расстояние между сторонами витка одной катушки, или шаг обмотки, у показан на рис. 1, г; он обычно выражается в числах пазов.
Трехфазный асинхронный двигатель является предпочтительным типом двигателя. Он в основном используется в промышленных приводах, потому что он очень разумный и энергичный, экономичный и надежный. Его также называют асинхронным двигателем, поскольку он не работает с синхронной скоростью. Асинхронный двигатель требует очень небольшого обслуживания, а также имеет высокую перегрузочную способность.
Трехфазный асинхронный двигатель в основном состоит из двух частей, называемых статором и ротором. Статор является неподвижной частью асинхронного двигателя, а ротор - вращающейся частью. Конструкция статора аналогична трехфазному синхронному двигателю, а конструкция ротора отличается для другой машины. Ниже подробно описывается конструкция асинхронного двигателя.

Рис. 3. Щиток асинхронной машины
Приведенная на рис. 1 и 2 обмотка статора называется однослойной, так как она укладывается в каждом пазу в один слой. Для того чтобы разместить лобовые части, пересекающиеся на плоскости, их изгибают по разным поверхностям (рис. 2, б). Однослойные обмотки выполняются с шагом, равным полюсному делению y = τ : (рис. 2, а), или этот шаг равен в среднем полюсному делению для разных катушек одной фазы, если y > 1 , y . В настоящее время более распространены двухслойные обмотки.
Статор изготовлен из высоколегированных сталей из легированной стали для уменьшения потерь на вихревые токи. Он имеет три основные части: внешний каркас, сердечник статора и обмотку статора. Это внешний корпус двигателя. Его основная функция - поддерживать сердечник статора и защищать внутренние части машины. Для небольших машин внешняя рама отлита, но для большой машины она изготовлена. На рисунке ниже показана конструкция статора.
Ядро статора построено из высококачественных штампов из кремниевой стали. Его основная функция - переносить переменное магнитное поле, которое вызывает гистерезис и потери вихревых токов. Штампы закреплены на раме статора. Каждое тиснение изолировано от другого тонким лаковым слоем. Толщина тиснения обычно колеблется от 3 до 5 мм. Слоты пробиты на внутренней стороне штамповок, как показано на рисунке ниже.
Начало и конец каждой из трех фаз обмотки выводятся на щиток машины, где имеется шесть зажимов (рис. 3). К верхним зажимам C1, С2, СЗ (начала фаз) подводятся три линейных провода от трехфазной сети. Нижние зажимы С4, С5, С6 (концы фаз) либо соединяются в одну точку двумя горизонтальными перемычками, либо каждый из этих зажимов соединяется вертикальной перемычкой с лежащим над ним верхним зажимом.
В первом случае три фазы статора образуют соединение звездой, во втором - треугольником. Если, например, одна фаза статора рассчитана на напряжение 220 В, то линейное напряжение сети, в которую включается двигатель, должно быть 220 В в случае включения статора треугольником; при включении его звездой линейное напряжение сети должно быть
![]()
При соединении статора звездой нейтральный провод не подводится, так как двигатель является для сети симметричной нагрузкой.
Ротор асинхронной машины набирается из штампованных листов изолированной электротехнической стали на валу или на специальной несущей конструкции. Радиальный зазор между статором и ротором делается возможно меньшим для обеспечения малого магнитного сопротивления на пути магнитного потока, пронизывающего обе части машины.
Наименьший зазор, допустимый по технологическим требованиям, составляет от десятых долей миллиметра до нескольких миллиметров в зависимости от мощности и габаритов машины. Проводники обмотки ротора располагают в пазах вдоль образующих ротора непосредственно у его поверхности с тем, чтобы обеспечить наибольшую связь обмотки ротора с вращающимся полем.
Асинхронные машины выпускаются как с фазным, так и с короткозамкнутым ротором.

Рис. 4. Фазный ротор
Фазный ротор имеет, как правило, трехфазную обмотку, выполняемую, подобно статорной, с тем же числом полюсов. Обмотка соединяется звездой или треугольником; три конца обмотки выводятся на три изолированных контактных кольца, вращающихся вместе с валом машины. Через щетки, укрепленные на неподвижной части машины и скользящие по контактным кольцам, в ротор включается трехфазный пусковой или регулировочный реостат, т. е. в каждую фазу ротора вводится активное сопротивление. Внешний вид фазного ротора представлен на рис. 4, на левом конце вала видны три контактных кольца. Асинхронные двигатели с фазным ротором применяются там, где требуется плавное регулирование скорости приводимого в движение механизма, а также при частых пусках двигателя под нагрузкой.
Конструкция короткозамкнутого ротора значительно проще, чем фазного. Для одной из конструкций на рис. 5, а показана форма листов, из которых набирается сердечник ротора. При этом отверстия вблизи наружной окружности каждого листа составляют в сердечнике продольные пазы. В эти пазы заливается алюминий, после его затвердения в роторе образуются продольные токопроводящие стержни. По обоим торцам ротора заодно отливаются алюминиевые кольца, замыкающие накоротко алюминиевые стержни. Полученная при этом токопроводящая система обычно называется беличьей клеткой.

Рис. 5. Короткозамкнутый ротор
Короткозамкнутый ротор с беличьей клеткой представлен на рис. 5,б. На торцах ротора видны вентиляционные лопатки, отливаемые заодно с короткозамыкающими кольцами. В данном случае пазы скошены на одно пазовое деление вдоль ротора. Беличья клетка проста, не имеет скользящих контактов, поэтому трехфазные асинхронные двигатели с короткозамкнутым ротором наиболее дешевы, просты и надежны; они наиболее распространены.
Для того чтобы получить вращающееся магнитное поле, на статоре двигателя располагают трехфазную обмотку. Обмотка помещается в пазы и состоит из ряда катушек, соединенных между собой. Каждая катушка сделана из одного или нескольких витков проводника, изолированных между собой и от стенок паза. Изоляция обмоток зависит от величины напряжения, температуры, на которую рассчитывается обмотка, формы и размеров паза, а также от типа обмотки. Если в пазу помещается одна катушечная сторона, то обмотка называется однослойной, если две - двухслойной. Катушка может быть сделана из нескольких секций, состоящих в свою очередь из одного или нескольких витков. На фиг. 235 показана катушка, изготовленная из двух секций, при этом каждая секция состоит из трех витков. Если через z обозначить общее число пазов статора, через 2р - число полюсов, то число пазов, приходящихся на одно полюсное деление, будет:
Полюсным делением называется расстояние по окружности статора или ротора между осями двух соседних полюсов. На расстоянии полюсного деления должны находиться пазы всех трех фаз. Следовательно, число пазов, приходящихся на полюс и фазу трехфазной обмотки, будет.
|
|

Шагом обмотки y называется расстояние между началом и концом катушки (или секция обмотки). Шаг обмотки выражается в долях полюсного деления или числом пазов. В двухслойных обмотках ширина секции берется обычно меньше (укороченный шаг), что позволяет лучше использовать медь обмотки.
На фиг. 236, a показана обмотка статора асинхронного двигателя. У этой обмотки каждая катушка состоит из двух проводников. Однако при намотке большого числа витков проводники закроют статор изнутри и ротор нельзя будет поставить на место. Отгибая проводники по сторонам, получим обмотку, показанную на фиг. 236, б. Обмотка, состоящая из трех катушек, создает магнитное поле с двумя полюсами. За один период трехфазного тока магнитное поле cде-
|
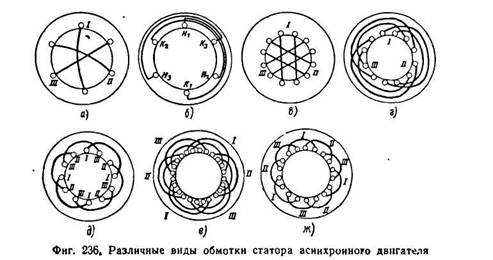
лает один оборот. При частоте 50 гц это будет соответствовать 50 об /сек. или 3000 об /мин.
На фиг. 236, в и г показана обмотка, у которой каждая сторона катушки состоит из двух проводников.
Скорость вращения магнитного поля четырехполюсного статора вдвое меньше скорости вращения поля двухполюсного статора, т. е. 1500 об/мин (при 50 гц). Обмотка четырехполюсного статора с одним проводником на полюс н фазу показана на фиг. 236, д, а с двумя проводниками на полюс и фазу - на фиг. 236, е.

Магнитное поле шестиполюсного статора имеет втрое меньшую скорость, чем двухполюсного, т. е. 1000 об/мин (при 50 гц). Обмотка шестиполюсного статора с одним проводником на полюс и фазу представлена на фиг. 236, ж.
Число всех пазов на статоре равно утроенному произведению числа полюсов статора на число пазов, приходящееся на полюс и фазу.
Развернутая схема трехфазной однослойной обмотки показана на фиг. 237, а двухслойной петлевой обмогкн с укороченным шагом - на фиг. 238.
Шесть концов обмотки статора выводятся на щиток зажимов двигателя.

 Виды лафетных стволов. Лафетный ствол пожарный. Переносной лафетный ствол. Стационарный лафетный ствол. Виды и типы пожарных стволов
Виды лафетных стволов. Лафетный ствол пожарный. Переносной лафетный ствол. Стационарный лафетный ствол. Виды и типы пожарных стволов Подбор и наем персонала — пошаговая инструкция, как искать и нанимать сотрудников Встреча и собеседование
Подбор и наем персонала — пошаговая инструкция, как искать и нанимать сотрудников Встреча и собеседование Повышаем продуктивность играючи: офисные игры, которые стоит взять на заметку Добрые игра для планерки
Повышаем продуктивность играючи: офисные игры, которые стоит взять на заметку Добрые игра для планерки Сущность предоставления социальных услуг населению по оквэд
Сущность предоставления социальных услуг населению по оквэд